Posts in Category: tessel
Update on the tessel arm
Figured I’d give an update on how the tessel arm has been coming.
I have since purchased a 3d printer kit…which was a little pain-staking to get going but now that I’ve got it working, I definitely know it pretty well…which was the point. I mentally prepared myself for the trials of getting it working and am continuing to learn still.
Using the 3d printer, I’ve been using a guy’s design and tweaking it as needed.
Here are some pics.


I’ve got it using pretty simple g-code right now. The software is going to be the kicker for this. I will end up having it work pretty similar to 3d printer to pic things up and move them. I’d like the software to be pretty intuitive to the user, drag and drop “locations” and loops to handle tedious tasks. =)
A buddy an I went in on a 10 pack of some 84oz/in torque steppers….and those things hold pretty well. With the motors engaged, I can pick up the whole thing by the end of the arm and it doesn’t budge. =)
Will post more as I progress. Time for this is short but still fun to play with when I can.
Tessel.io
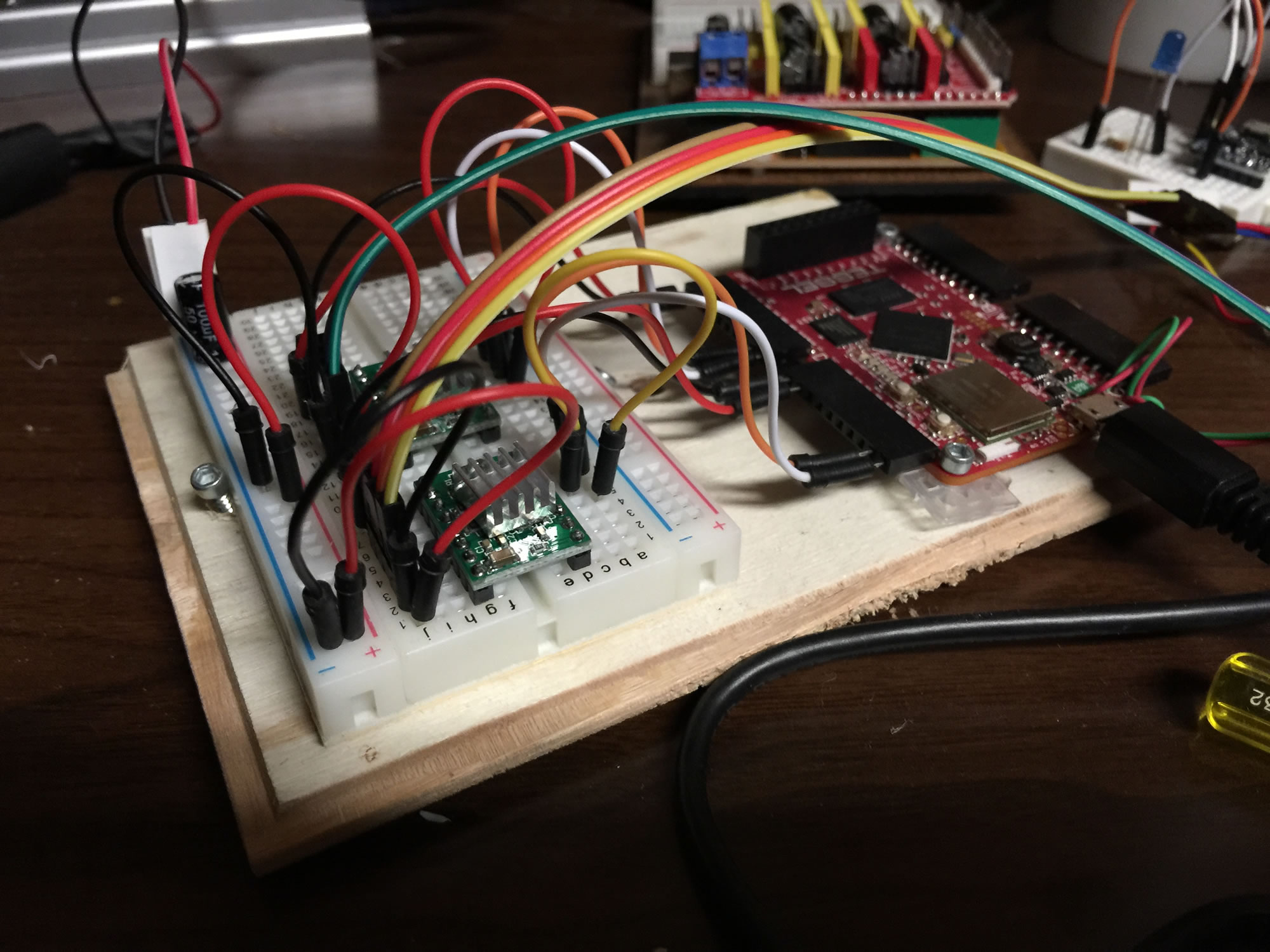
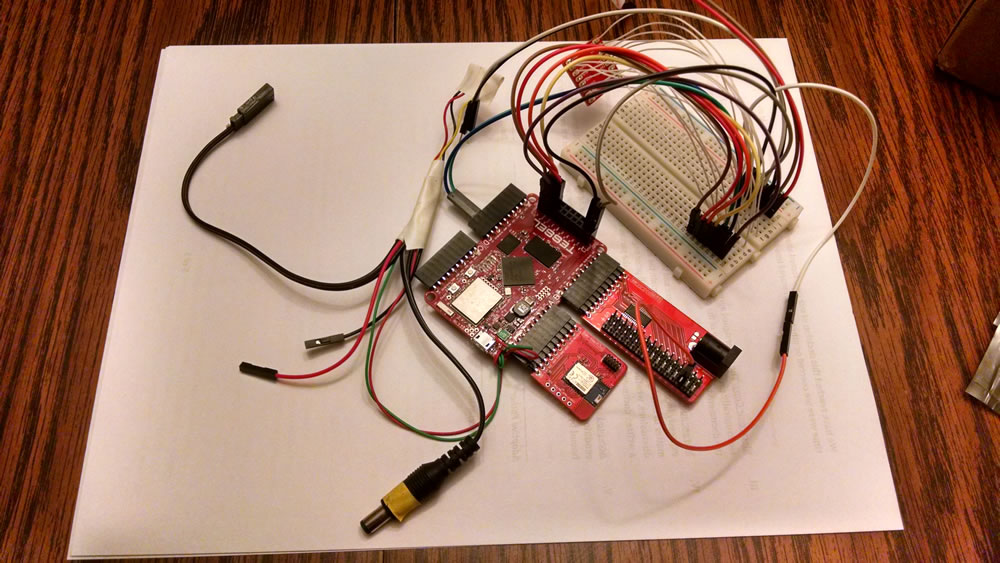 So I was able to get my hands on a tessel board and it has been a lot of fun! I’ve been toying with simple servo controls all the way to the Bluetooth Low Energy module (learning that from scratch was interesting!).
So I was able to get my hands on a tessel board and it has been a lot of fun! I’ve been toying with simple servo controls all the way to the Bluetooth Low Energy module (learning that from scratch was interesting!).
Using the servos I made a little arm to pick things up…but since it is made out of balsa wood, it is pretty flimsy.
I was able to get my hands on a stepper motor and get that working with the tessel so ideally I’ll keep going the same route to have the “arm” move up and down a track knowing it’s position as it goes. Maybe even have the arm be able to do a full 360 twist as well to be able to work on both sides of the track. Check out a video of what I have so far here.
The cool thing about the tessel is it’s native language is javascript so most developers coming from a web background can easily get to tinkering with hardware/electronics with it!
Will be exciting to see what others pull off with this thing!